Sechs Achse langen Arm Version des kleinen Nutzlast Serie LRMate Roboter.
5 kg Nutzlast, schnell und präzise. Ausgestattet mit der modernsten und vielseitigsten R30iA Controller, kompakte Größe.
Die FANUC LR Mate 200iC ist ein kompaktes, High-Speed-Roboterarm mit einem schlanken Profil und geringes Gewicht. Hohe Positioniergenauigkeit und ein Tischgröße machen es für eine Vielzahl von Automatisierungsanwendungen ideal. Tooling und Integration des LR Mate 200iC durch strategisch pneumatische vereinfacht und die elektrischen Verbindungen und zwei doppeltwirkenden Magnetventile.
Leichter und kompakter als die Vorgänger LR Mate Modelle bietet das 200iC die gleiche Grundfläche und Handlochkreis als frühere Generationen für einfache Upgrades. Eine geschlossene mechanische Konstruktion beseitigt Kabel und Schlauch snagging.
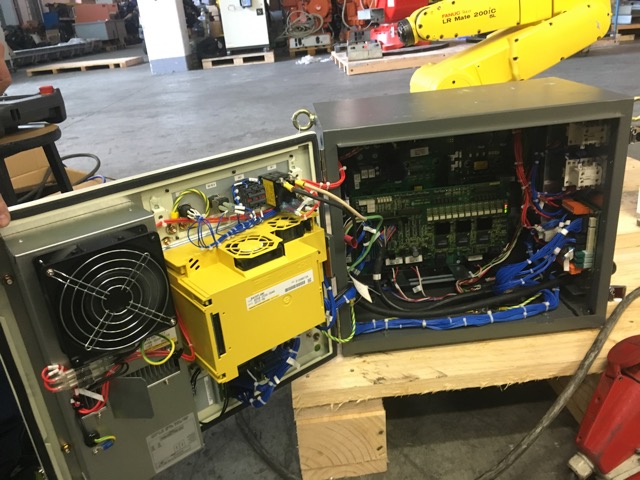
Die kompakte R-30iA Mate-Controller auf die Zuverlässigkeit der Standard FANUC R-30iA Controller aufgebaut. Es ist als ein Rackmount das passt in ein Standard-19 "Elektronik-Rack. Es ist nützlich, in klimakontrollierten Anwendungen wie Lebensmittel Labor, pharmazeutische, medizinische und Bildungseinrichtungen.
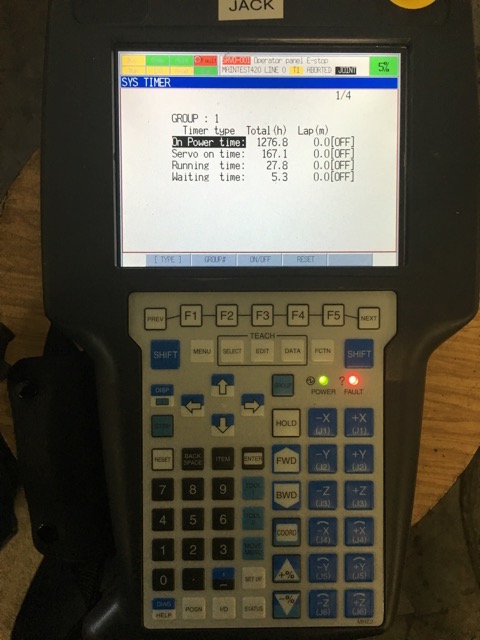
Die R-30iA Mate-Schnittstellen mit dem Standard FANUC iPendant für einfache Programmierung. Die iPendant ist eine Farbe, Internet-ready Teach Pendant.
Haupteigenschaften
- Maximale Belastung der Roboter: 5 kg
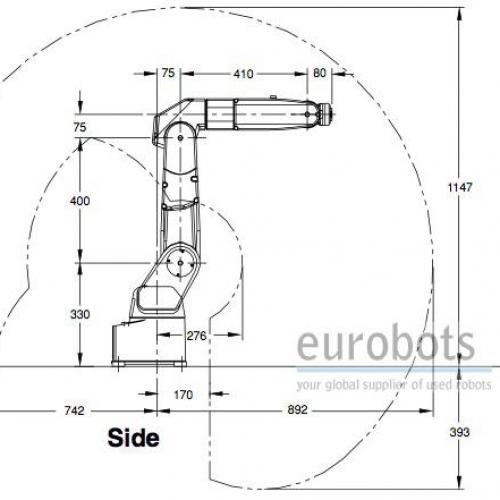
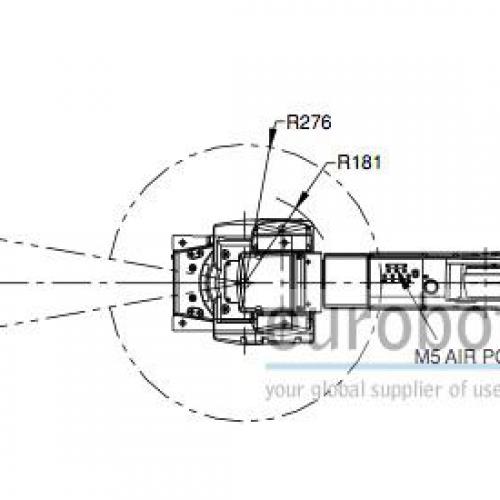
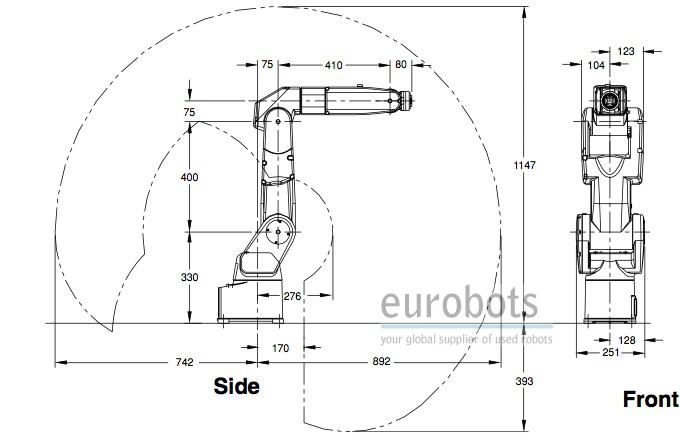
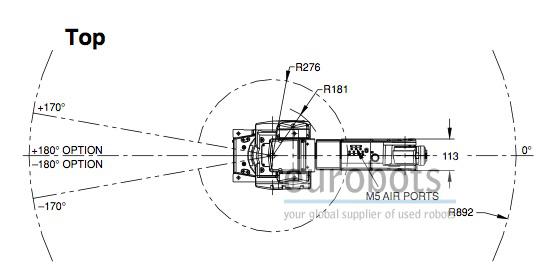
- Maximale Reichweite: 892 mm.
- Wiederholgenauigkeit: 0,03 mm.
- Controller: R-30iA Kamerad
Achsdaten
- Achse 1: 270 ° / s
- Achse 2: 270 ° / s
- Achse 3: 270 ° / s
- Achse 4: 450º / s
- Achse 5: 450º / s
- Achse 6: 720º / s
Roboter - Bewegungsbereich
- Achse 1: + -340º
- Achse 2: + -230º
- Achse 3: + -373º
- Achse 4: + -380º
- Achse 5: + -240º
- Achse 6: + -720º
Anwendungen
- Maschinen Laden / Entladen
- Materialtransport
- Prüfung und Probenahme
- Elektronik / Reinraum-
- Teilereinigung / Wasch
- Versammlung
- Der Materialabtrag
- Verpackung
- Ausbildung
Anwendungen
Be- und Entladen von Teilen , Handhabung von Teilen , Montage von Teilen







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}