 English
English
 Spain
Spain
 France
France
 Russia
Russia
 China
China
 Argentina
Argentina
 Portugal
Portugal
 Colombia
Colombia
 Italy
Italy
 India
India
 Brazil
Brazil
 Japan
Japan
 Mexico
Mexico
 Turkey
Turkey
 Ukraine
Ukraine
 Peru
Peru
 Sth. Africa
Sth. Africa
ABB IRB 6600 on track
ABB 7-Achsen-Industrieroboter mit hoher Nutzlast, montiert auf einer 5 Meter langen servogesteuerten Strecke. Dieser ABB IRB6600 Industrieroboter hat eine Reichweite von 2800 mm und eine Ladekapazität von 175 kg. Der Controller des Roboters hat integrierte Hardware und Software, um diese zusätzliche Achse zu steuern.
Der IRB6600 ist die Weiterentwicklung des berühmten IRB6400. Höhere Geschwindigkeit und eine völlig neue Form ermöglichen einen breiteren Arbeitsraum in den Achsen 2 und 3. Ein Einzelfeder-Gegengewichtsystem nach der Kuka und Fanuc Philosophie (Kuka Serie 2000 und Fanuc R2000). Der IRB 6600 verfügt über ein integriertes Serviceinformationssystem, mit dem Service und Wartung einfacher geplant werden können.
Ausgestattet mit dem leistungsstarken Controller M2000 S4CPlus.
S4Cplus bietet Ihnen überlegene Bewegungskontrolle. Es verfügt über eine dynamische modellbasierte Steuerung, QuickMove für kurze Zykluszeiten und die TrueMove-Funktion für hochpräzise Pfadverfolgungsfunktionen unabhängig von der Robotergeschwindigkeit. Die S4Cplus-Systemkonfigurationsfähigkeit und die leistungsfähige Programmiersprache RAPID erleichtern die Einrichtung des Controllers für eine Vielzahl von Anwendungen. Zwei integrierte Ethernet-Kanäle ermöglichen eine einfachere Wartung und Fabrikvernetzung.
Es gibt Feldbus- und serielle Kanäle für SPS- und PC-Verbindungen.
Der Controller unterstützt TCP / IP, DNS und andere Protokolle. Ein dediziertes Roboterprotokoll, RAP, steht für die Steuerung und Überwachung zur Verfügung.
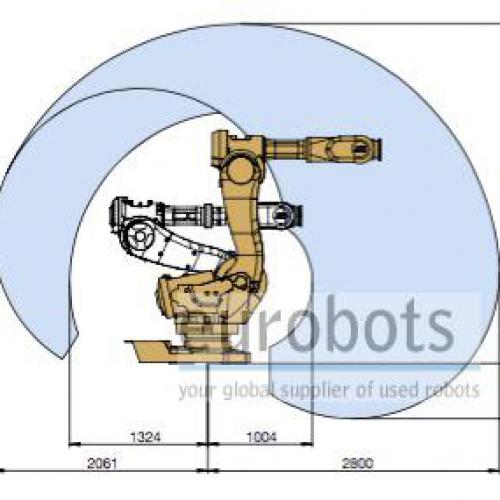
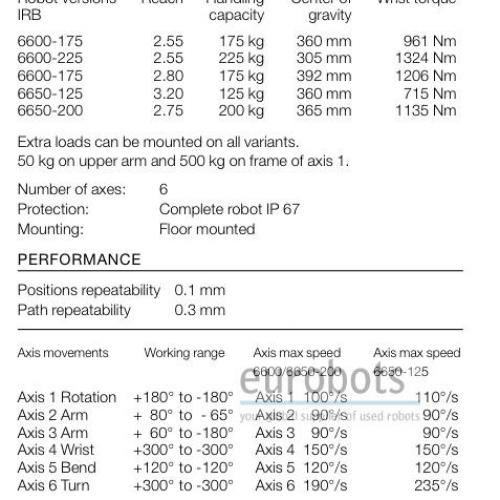
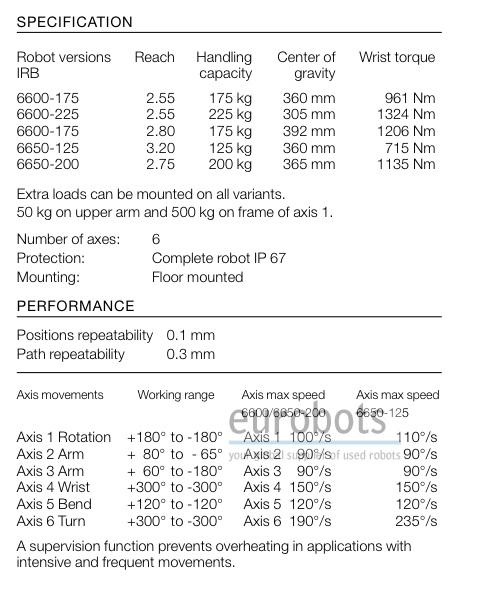
Technische Daten
- Maximale Ladekapazität: 175 Kg
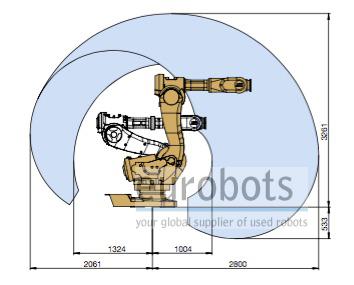
- Maximale Reichweite: 2800 mm
- Wiederholbarkeit: 0,1 mm
- Controller: M2000 S4CPlus
Roboterbewegungsgeschwindigkeit
- Achse 1: 100º / s
- Achse 2: 90º / s
- Achse 3: 90º / s
- Achse 4: 150º / s
- Achse 5: 120º / s
- Achse 6: 190º / s
Anwendungen
- Punktschweißen
- Presse neigen
- Material Handling
- Maschinenpflege
- Palettierung
- Versammlung
Anwendungen
Punktschweißen , Drücken Sie Tending , Handhabung von Teilen




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}