 English
English
 Spain
Spain
 France
France
 Russia
Russia
 China
China
 Argentina
Argentina
 Portugal
Portugal
 Colombia
Colombia
 Italy
Italy
 India
India
 Brazil
Brazil
 Japan
Japan
 Mexico
Mexico
 Turkey
Turkey
 Ukraine
Ukraine
 Peru
Peru
 Sth. Africa
Sth. Africa
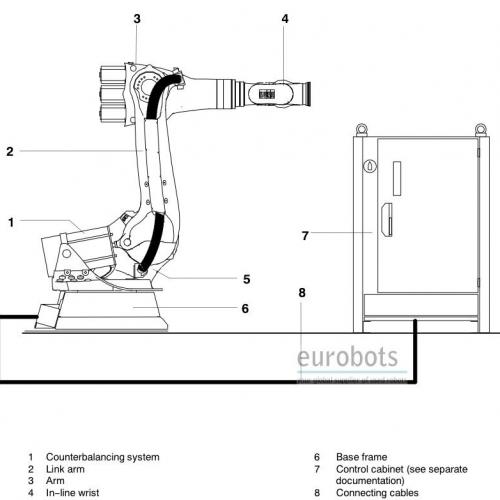
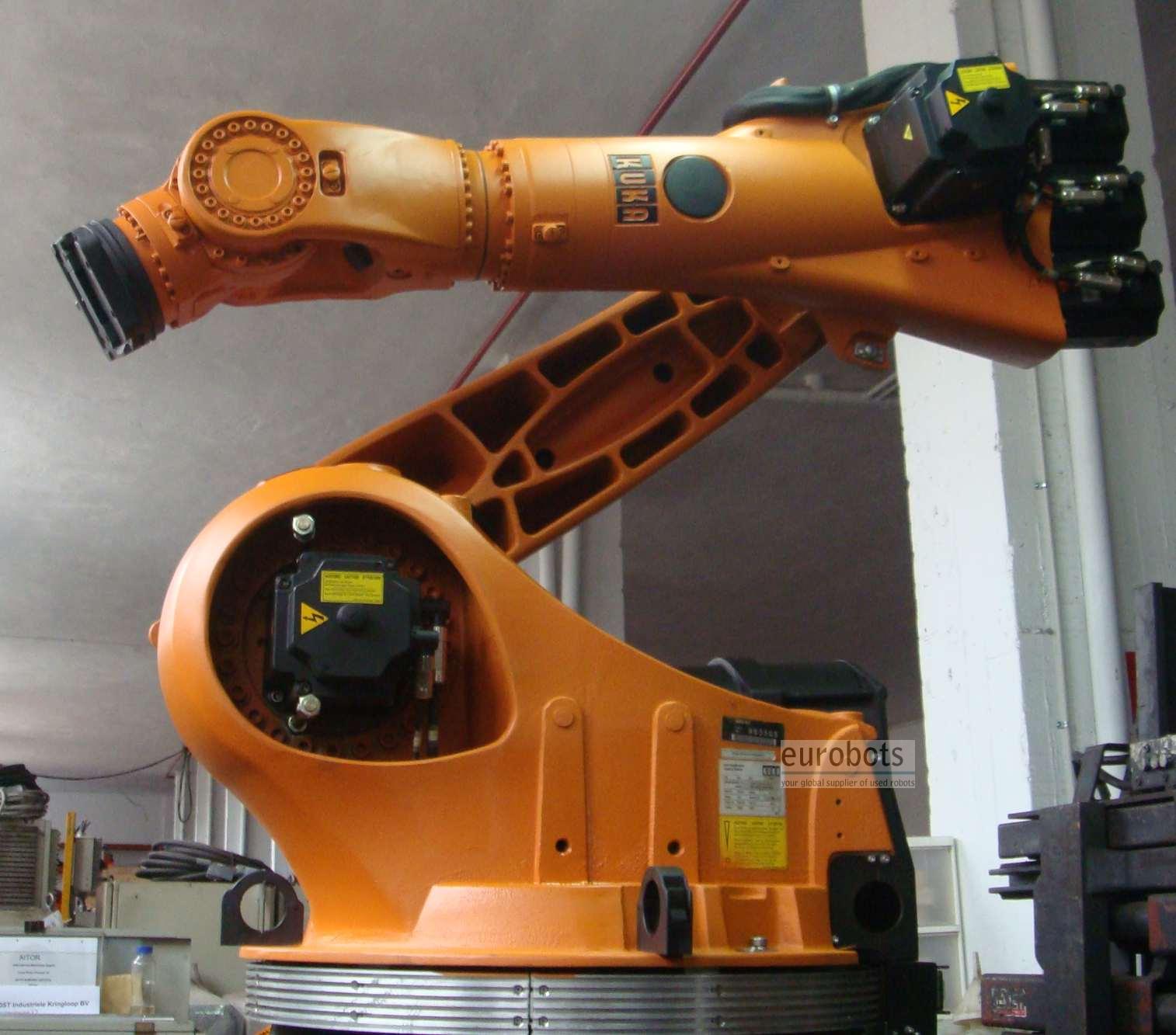
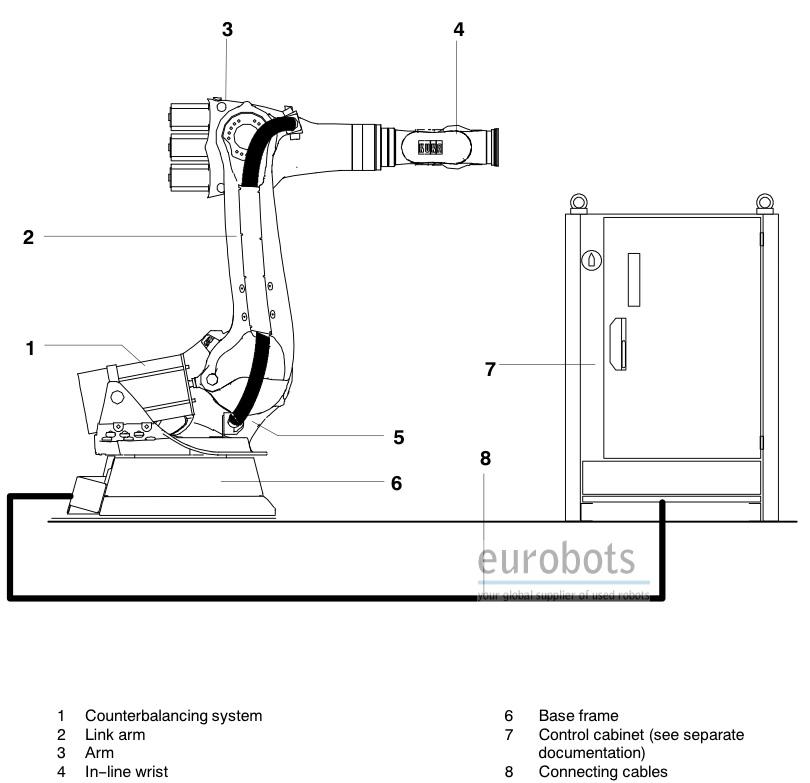
KUKA KR210 VKRC2 control
Baujahr 20012002. Rund 8.000 bis 10.000 Arbeitsstunden. Schwerlastroboter für allgemeinen Zweck. Dieser Roboter ist im Wesentlichen der gleiche wie die KR210 2000-Serie mit KRC2 Standardsteuerung. Der Unterschied liegt in der Steuerung, die eine Kuka Softwareversion 3.3.4 hat, die für den VW-Konzern entwickelt wurde. Die Hardware des Schaltkastens ist nahezu identisch und die Philosophie und Programmierungsumgebung wird gleich ausgeführt.
Die Unterschiede zwischen der KRC2 und VKRC2 Programmierung
Kontrollsystem "KRC2 Standard"
Das Hauptmerkmal ist, dass das ganze System offen von Anfang an ist, wir können Optionen für Programmierung bearbeiten, sie sind offen für alle Programmierer auf zwei Ebenen:
Benutzername:
Die Standardebene der Programmierung erlaubt uns, die Arbeitstools und geladene Basen sowohl als externe Kalibrierung des Roboters berechnen, Programme entwickeln, ändern, duplizieren, löschen, usw. ..
Auch auf dieser Ebene können die im Programm definierten Variablen modifiziert und Ausgangsfreigabeeingänge angezeigt werden.
Expertenebene:
Diese Ebene wird als erweitert definiert, alle Optionen sind dem Programmierer zugänglich, in diesem Fall ist die Erstellung von Programmen ausgeschlossen, alternativ kann man die Programme, die die Programmcodes einführen, bearbeiten.
Auf dieser Ebene werden Treiber auch für die Kommunikation mit der Peripherie konfiguriert.
Alle Programme, die mit diesem System erstellt wurden, wurden nach der angemessenen Meinung des Entwicklers benannt, um jede Rolle zu erfüllen:
"Teil_greifen", "Schieber_heben" usw ...
Das Management von "Mainstream" Programmen kann durch das Programm "Cell" an eine SPS Linie verbunden werden und alle Programme können zwischen ihnen verknüpft werden.
Kontrollsystem "VKRC2 VW"
Dieses System ist mit Volkswagen für die Fahrzeug-Arbeit eingerichtet.
Das Hauptmerkmal liegt in der Einfachheit und der schnellen Diagnose des Systems.
Im System sind VKRC2 Modi auch Benutzer- und Experten-, aber hier kann alles von der Benutzerebene durchgeführt werden. Der Zugriff auf Expertenebene ist mit einem Schlüssel möglich.
Tasten, abhängig von den Möglichkeiten, die wir haben, erscheinen, durchgeführt werden, kurz gesagt, keine üblen Machenschaften können den Programmiercode eingeben. Offensichtlich ist, dass man vom System keine Mitteilung erhält, ob man hinzugefügte Anweisungen entsprechend sind.
Beispiel: (OUT "56" TRUE), wenn es vielleicht zu dieser Zeit (OUT "56" FALSE) notwendig wäre.
Programme, die mit diesem System verwendet werden können und eine bestimmte Struktur haben.
Folge: Die Programme werden durch automatisiertes Äußere geführt und können nur mit einem Automaten aufgerufen werden.
Up: Sub mit Bewegung, die nur von einer oder anderen Up Folge aufgerufen werden kann.
Makro: Sub keine Bewegung, die von einer Folge, einem Up oder anderem Makro aufgerufen werden kann.
Mit diesem System verlieren wir die Fähigkeit, Grundlagen zu berechnen
Dies könnte anders gelöst werden - mit drei Punkten in der Datenbank, die definiert und behandelt sind, als ob sie ein externes Tool wären.
Nach der Berechnung der Tools berechnen wir Punkt zu jedem Punkt der Basis und die daraus resultierenden kartesischen Koordinaten wären dieser bestimmte Punkt.
Zusammenfassung
Das System VKRC2 ist schneller zu programmieren, aber verliert Wirksamkeit bei Anwendungen, die spezifische Programmierung erfordern.
Es ist ein System, erzeugt, um nach einem definierten Standard, der festgelegt ist, zu funktionieren.
Das System KRC2 gibt mehr Programmierungsraum, um alle Möglichkeiten sind offen, und das ist wichtig für die Einrichtungen, die stark voneinander abweichen.
Auf jeden Fall ist die Programmierung im Experten-Modus genau das gleiche mit den beiden Systemen und sowohl die Leistungsmerkmalen als auch die Handhabung und endgültige Ergebnisse sind identisch.
Dies ist derselbe Roboter mit der Fähigkeit, eine von zwei Möglichkeiten festzulegen:
VKRC2 schneller.
KRC2 vielseitiger.
Robot Info:
- Anzahl der Achsen: 6
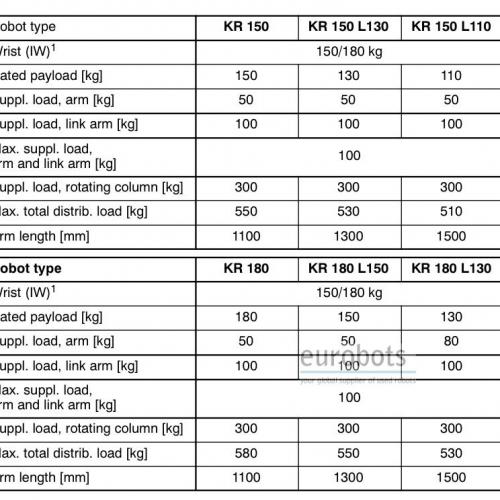
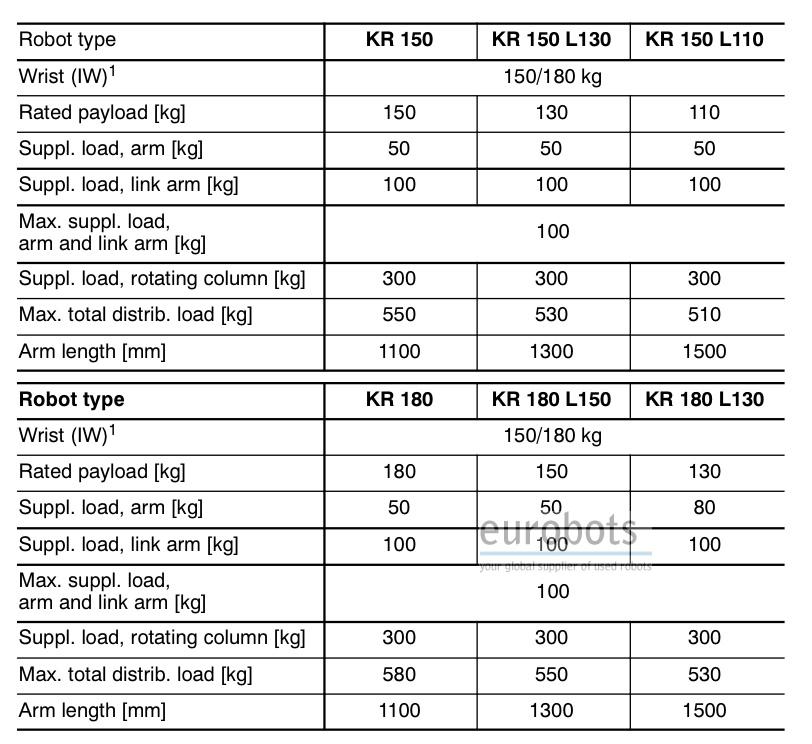
- Max. Traglast: 150/180/210Kg.
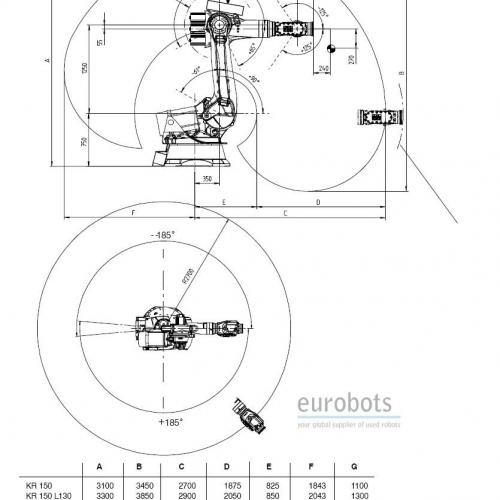
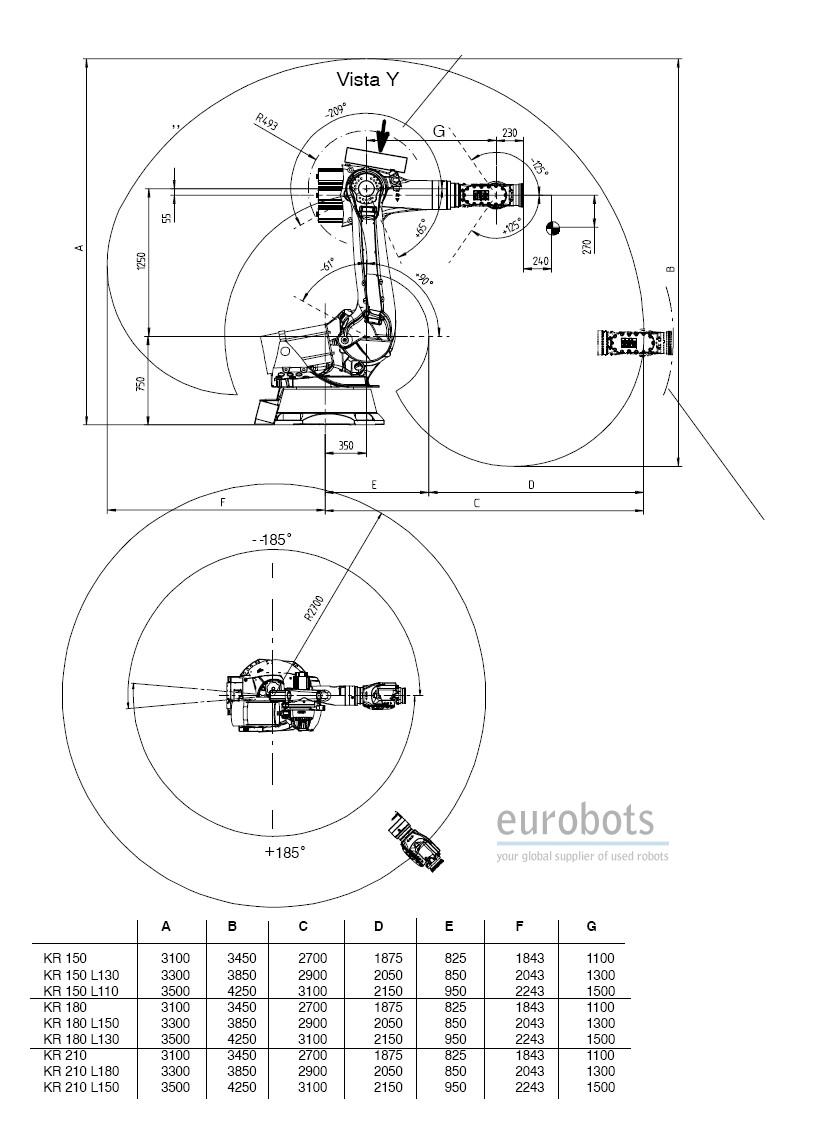
- Arbeitsbereich: 2700/2900/3100 mm.
- Wiederholgenauigkeit: 0.15-0.2 mm.
- Steuerung : VKR C2 Softwarestand 3.3.4
Robot Motion Speed:
- Axe 1: 105º/seg
- Axe 2: 110º/seg
- Axe 3: 95º/seg
- Axe 4: 170º/seg
- Axe 5: 170º/seg
- Axe 6: 238º/seg
Robot Applications:
- Bearbeiten
- Maschinenbeschickung
- Polieren, Schleifen, Entgraten
- Beschichten und Kleben
- Handhaben
- Messen und Prüfen
- Montieren
- Palettieren und Kommissionieren
- Schneiden
- Schweißen
Anwendungen
Lichtbogenschweißen , Punktschweißen , Drücken Sie Tending , Palettieren , Be- und Entladen von Teilen , Bearbeitung , Handhabung von Teilen , Laserschweissen Nd:Yag , Kleben - Kleben , Bolzenschweissen






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}